
Este projeto descreve como um motor DC pode ser movido para frente ou para trás usando um controle remoto de TV ou DVD.O objetivo é construir um driver de motor bidirecional simples que use trem de pulsos infravermelho modulado (IR) de 38kHz para esse propósito, sem usar qualquer microcontrolador ou programação.
O protótipo do autor é mostrado na Fig.

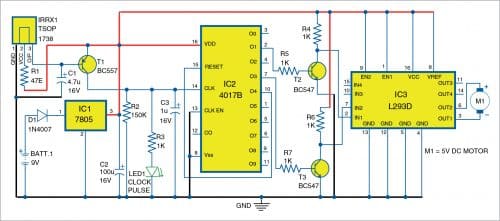
Circuito e funcionamento
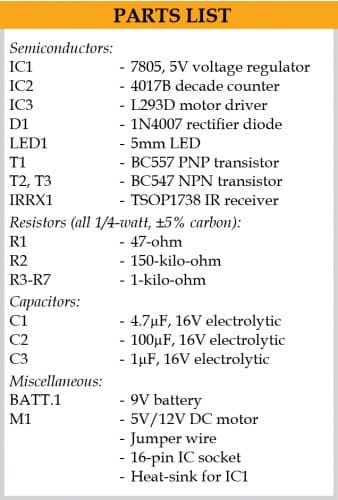
2. Ele é construído em torno do módulo receptor IR TSOP1738 (IRRX1), contador de décadas 4017B (IC2), driver de motor L293D (IC3), transistor PNP BC557 (T1), dois transistores BC547 NPN ( T2 e T3), fonte de alimentação regulada de 5V (IC1) e bateria de 9V.
A bateria de 9V é conectada através do diodo D1 ao regulador de tensão 7805 para gerar os 5V DC necessários ao projeto.O capacitor C2 (100µF, 16V) é usado para rejeição de ondulação.
Em condições normais, o pino de saída 3 do módulo IR IRRX1 está em nível lógico alto, o que significa que o transistor T1 conectado a ele está cortado e, portanto, seu terminal coletor está em nível lógico baixo.O coletor de T1 aciona o pulso de clock do contador de décadas IC2.
Ao apontar o controle remoto para o módulo IR e pressionar qualquer tecla, o módulo recebe os pulsos IR de 38kHz do controle remoto.Esses pulsos são invertidos no coletor de T1 e dados ao pino de entrada de clock 14 do contador de décadas IC2.
Os pulsos IR que chegam incrementam o contador de décadas na mesma taxa (38kHz), mas devido à presença do filtro RC (R2=150k e C3=1µF) no pino de entrada de clock 14 do IC2, o trem de pulsos aparece como um único pulso em o contador.Assim, ao pressionar cada tecla, o contador avança apenas uma contagem.
Quando a tecla do controle remoto é liberada, o capacitor C3 descarrega através do resistor R2 e a linha do relógio torna-se zero.Assim, toda vez que o usuário pressiona e solta uma tecla do controle remoto, o contador recebe um único pulso na entrada do relógio e o LED1 acende para confirmar que o pulso foi recebido.
Durante a operação podem existir cinco possibilidades:
Caso 1
Quando a tecla do controle remoto é pressionada, o primeiro pulso chega e a saída O0 do contador de décadas (IC2) fica alta enquanto os pinos O1 a O9 estão baixos, o que significa que os transistores T2 e T3 estão no estado de corte.Os coletores de ambos os transistores são levados ao estado alto por resistores de 1 quilo-ohm (R4 e R6), de modo que ambos os terminais de entrada IN1 e IN2 do driver do motor L293D (IC3) ficam altos.Nesta fase, o motor está desligado.
Caso 2
Quando uma tecla é pressionada novamente, o segundo pulso que chega na linha CLK incrementa o contador em uma unidade.Ou seja, quando chega o segundo pulso, a saída O1 do IC2 fica alta, enquanto as demais saídas ficam baixas.Portanto, o transistor T2 conduz e T3 é cortado.O que significa que a tensão no coletor de T2 diminui (IN1 do IC3) e a tensão no coletor de T3 torna-se alta (IN2 do IC3) e as entradas IN1 e IN2 do driver do motor IC3 tornam-se 0 e 1, respectivamente.Nesta condição, o motor gira no sentido direto.
Caso 3
Quando uma tecla é pressionada novamente, o terceiro pulso que chega à linha CLK incrementa novamente o contador em uma unidade.Portanto, a saída de O2 do IC2 aumenta.Como nada está conectado ao pino O2 e os pinos de saída O1 e O3 estão baixos, ambos os transistores T2 e T3 vão para o estado de corte.
Os terminais coletores de ambos os transistores são puxados para o estado alto pelos resistores R4 e R6 de 1 quilo-ohm, o que significa que os terminais de entrada IN1 e IN2 do IC3 ficam altos.Nesta fase, o motor está novamente no estado desligado.
Caso 4
Quando uma tecla é pressionada mais uma vez, o quarto pulso que chega à linha CLK incrementa o contador em uma unidade pela quarta vez.Agora a saída O3 do IC2 fica alta, enquanto as saídas restantes estão baixas, então o transistor T3 conduz.O que significa que a tensão no coletor de T2 fica alta (IN1 de IC3) e a tensão no coletor de T3 fica baixa (IN2 de IC3).Portanto, as entradas IN1 e IN2 do IC3 estão nos níveis 1 e 0, respectivamente.Nesta condição, o motor gira no sentido inverso.
Caso 5
Quando uma tecla é pressionada pela quinta vez, o quinto pulso que chega à linha CLK incrementa o contador em uma unidade novamente.Como O4 (pino 10 do IC2) está conectado ao pino de entrada de reinicialização 15 do IC2, pressionar pela quinta vez traz o IC do contador de décadas de volta à condição de reinicialização com O0 alto.
Assim, o circuito opera como um driver de motor bidirecional que é controlado por um controle remoto infravermelho.
Construção e teste
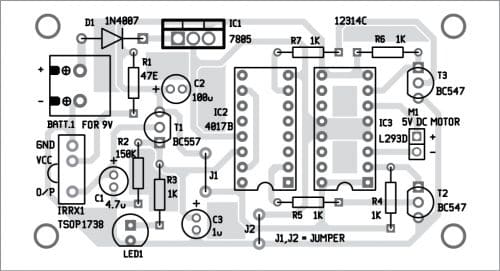
O circuito pode ser montado em um Veroboard ou PCB cujo layout em tamanho real é mostrado na Fig. 3. O layout dos componentes do PCB é mostrado na Fig.
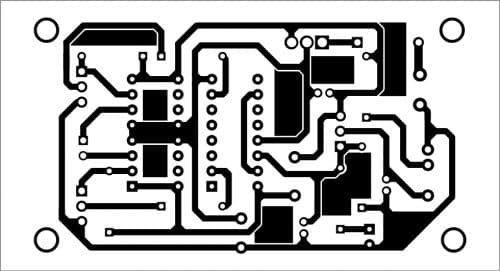
Baixe PDFs de layout de PCB e componentes:Clique aqui
Após montar o circuito, conecte a bateria de 9V em BATT.1.Consulte a Tabela Verdade (Tabela 1) para operação e siga as etapas descritas no Caso 1 ao Caso 5 acima.
Editado por Lisa
Horário da postagem: 29 de setembro de 2021